Underwater Surveillance Vehicle
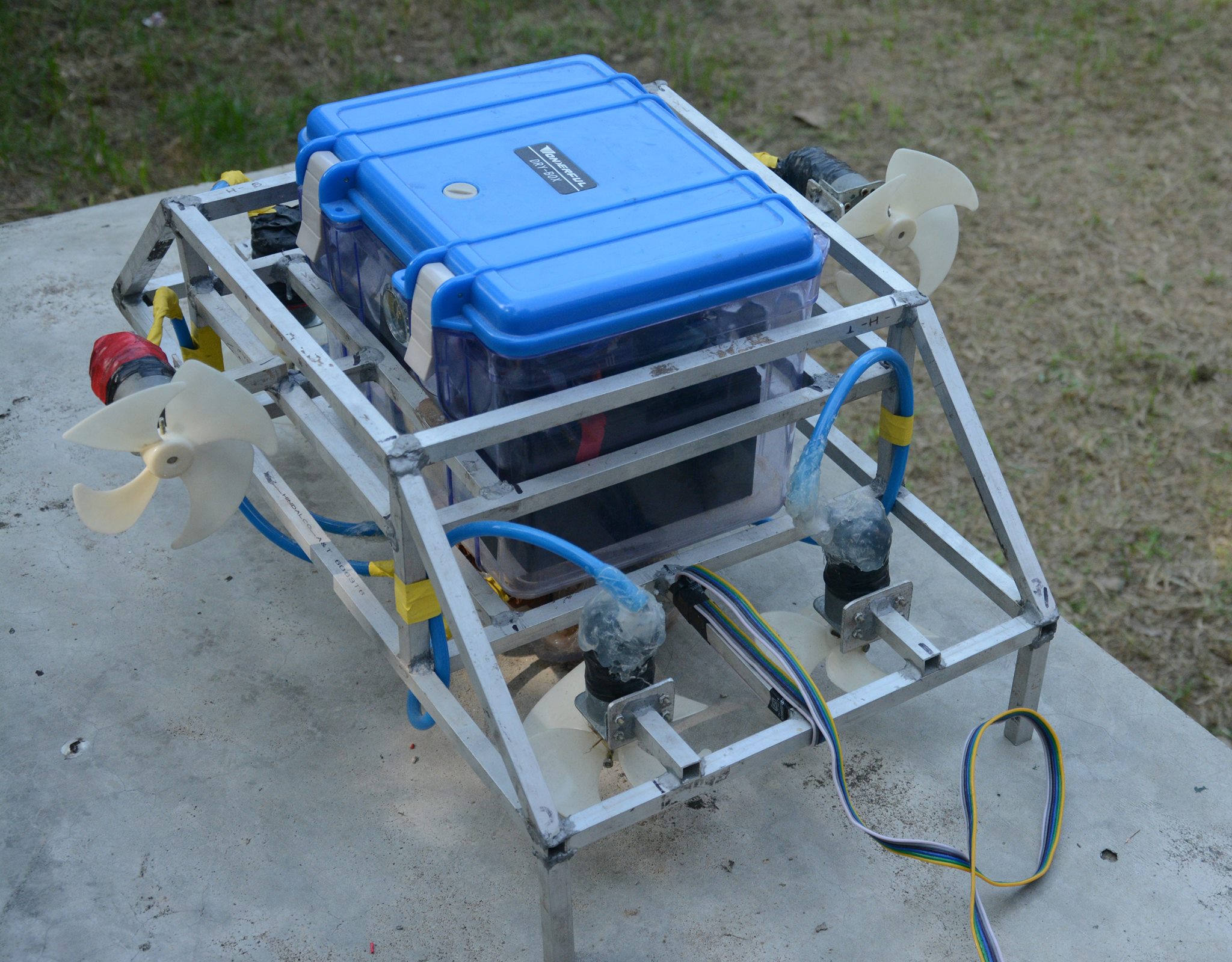
The objective of the project was to design a prototype for an underwater surveillance vehicle that could be deployed to search riverbeds while fighting against river currents. We designed from scratch, built and tested a robust underwater vehicle capable of manoeuvrability with 6 DOF, and autonomous stabilization using PID control. I also designed and built the electronic circuitry for power management and communication with ground station.
This project won 2nd Prize for Best Project at the IIT Kanpur Student Research Convention 2014.
A short report can be accessed here: [Report]