Industrial Reactor Cleaning Robot
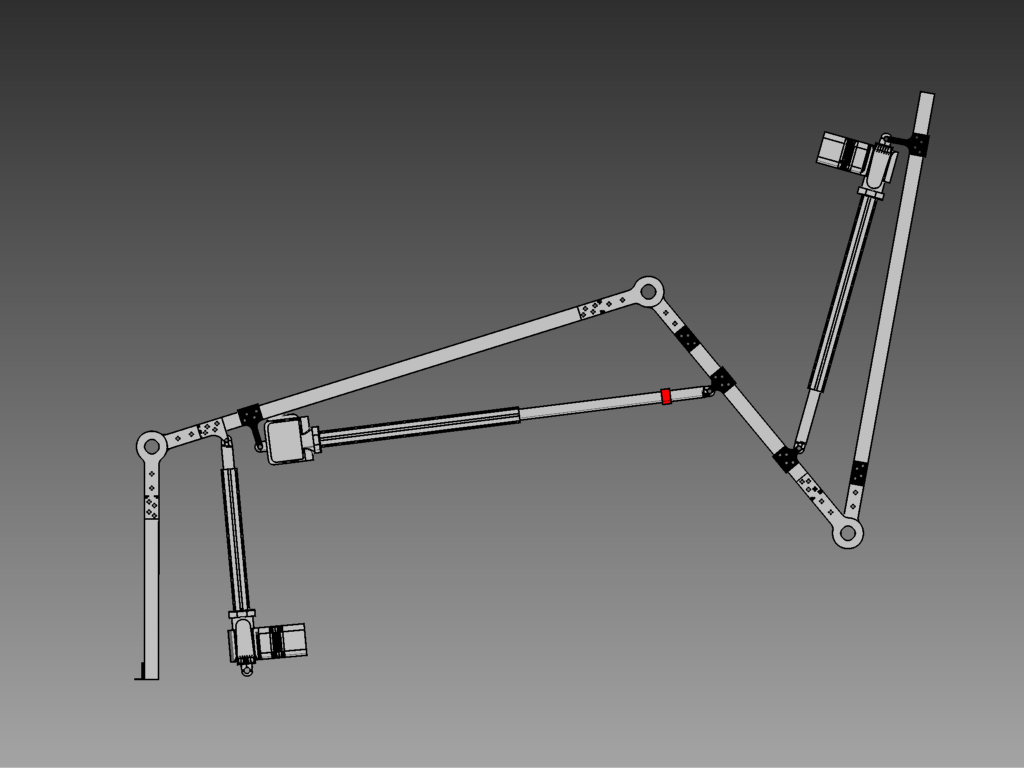
As a part of Agilo Technologies, I developed the control system and user interface for a 3 link planar robotic arm to be used in cleaning industrial chemical reactors at the largest crude oil refinery in the world operated by Reliance Industries Ltd.
We implemented an inverse kinematic solution with singularity robustness to make sure the teleoperated robot did not accidentally go into a singularity configuration. The software stack for the control pipeline, incorporating encoder and limit feedback, kinematic calculations, actuator control and the user interface for teleoperation was built using ROS.